Industrial Use Case
Published:
Robotic winding for additive manufacturing
Description
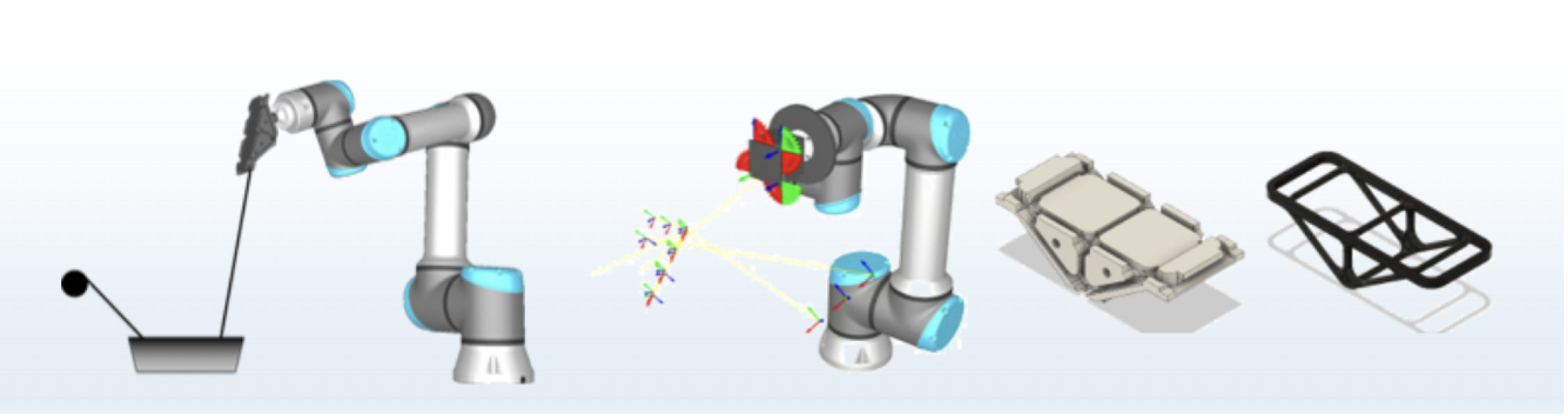
We study the repetitive winding of a carbon fiber wire around a complex geometry core in order to create a wireform structure with high tensile strength. The process currently involves time-consuming stages (manually planning and teaching the robot) to achieve implementation, for each distinct core geometry.
To make it more deployable, we investigate optimization and learning-based methods (e.g., Bayesian, sampling, gradient-based optimization, meta-learning, model predictive control) in order to:
Optimize the joint controller gains to closely follow the task (increasing robustness)
Identify the system-related parameter (e.g., friction, wire elastic modulus)
Online track of the physical properties of the wire (e.g., tensile strength)
Generalize to different core geometries
Automate the operation planning
A digital twin that accurately represents the wire-robot interaction allows us to get better insights into this process and perform a more rapid adaptation to new products and tasks. For this, we are exploring several platforms, from available physics-based engines to professional solutions like Siemens Amesim.
Project partners: ZHAW IMPE, NCCR Automation, Siemens Digital Industries.
- Publication: Iterative Tuning of Nonlinear Model Predictive Control for Robotic Manufacturing Tasks, Deepak Ingole, Valentin Bhend, Shiva Ganesh Murali, Oliver Doebrich, Alisa Rupenyan (under review) https://arxiv.org/abs/2512.13170